Multi Spectral Camera
Hailing from the Mississippi Delta, I have always been interested in agriculture. Recently, I was looking into ways to incorporate UAV’s into farming. While researching the topic, I discovered an industry known as “precision agriculture.” Wikipedia defines this field as “a farming management concept based on observing, measuring and responding to inter and intra-field variability in crops.” After reading further into the topic, I found that many companies are using multi-spectral imaging to evaluate crop health. This is especially useful for crop consultants who are always looking for ways to provide the best information to their customers – the farmers.
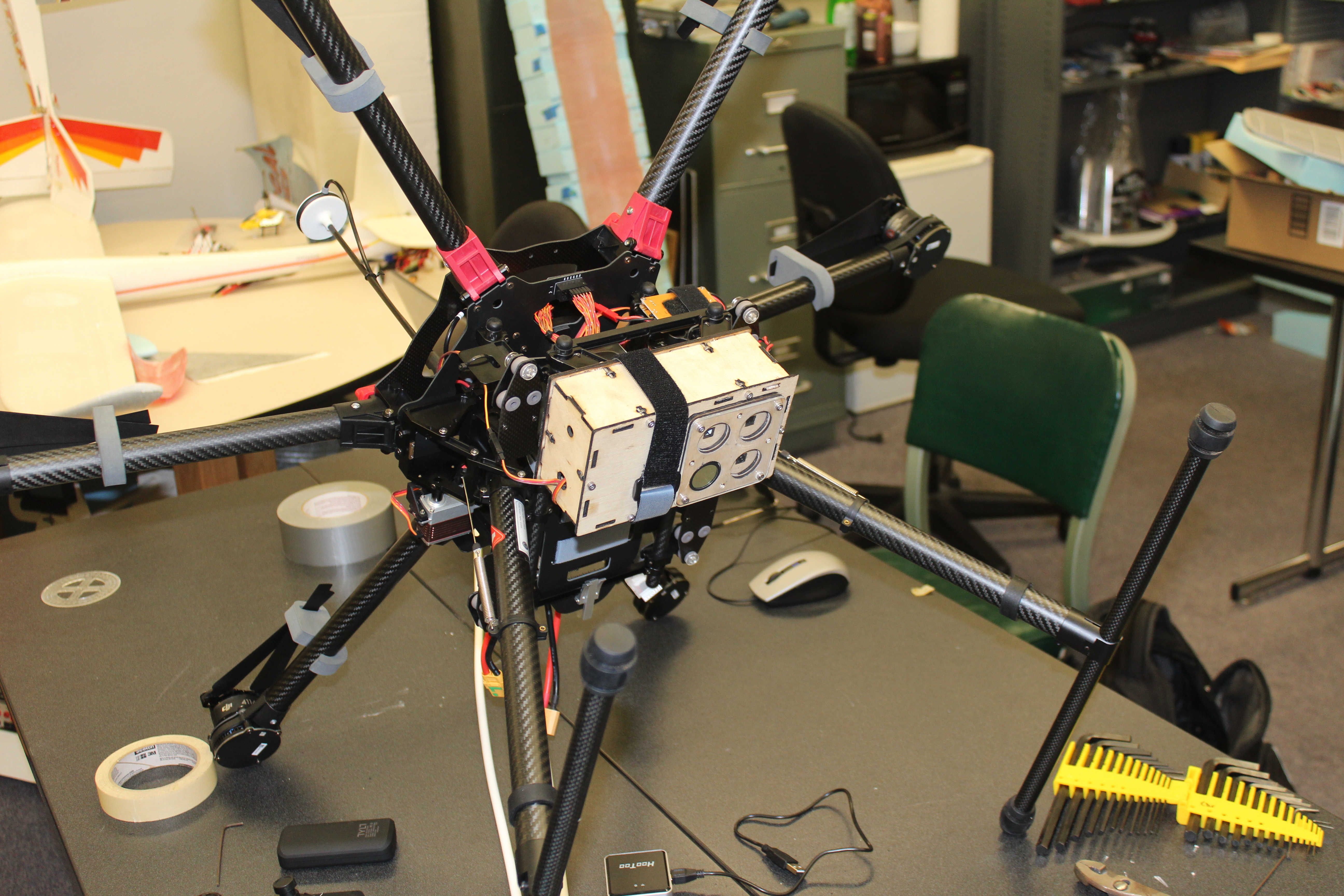
I realized that even though precision agriculture, and more specifically, multi-spectral imaging, is a relatively new area of research, it still has a large barrier to entry in the form of high camera costs. In fact, most consumer level multi-spectral agricultural cameras are close to $4000. To work around this problem, a graduate student, Christopher D. Simpson and I decided to build our own camera. Using a camera device created by ecologist Dr. Koen Hufkens as our model, we created a fully functioning multi-spectral camera.
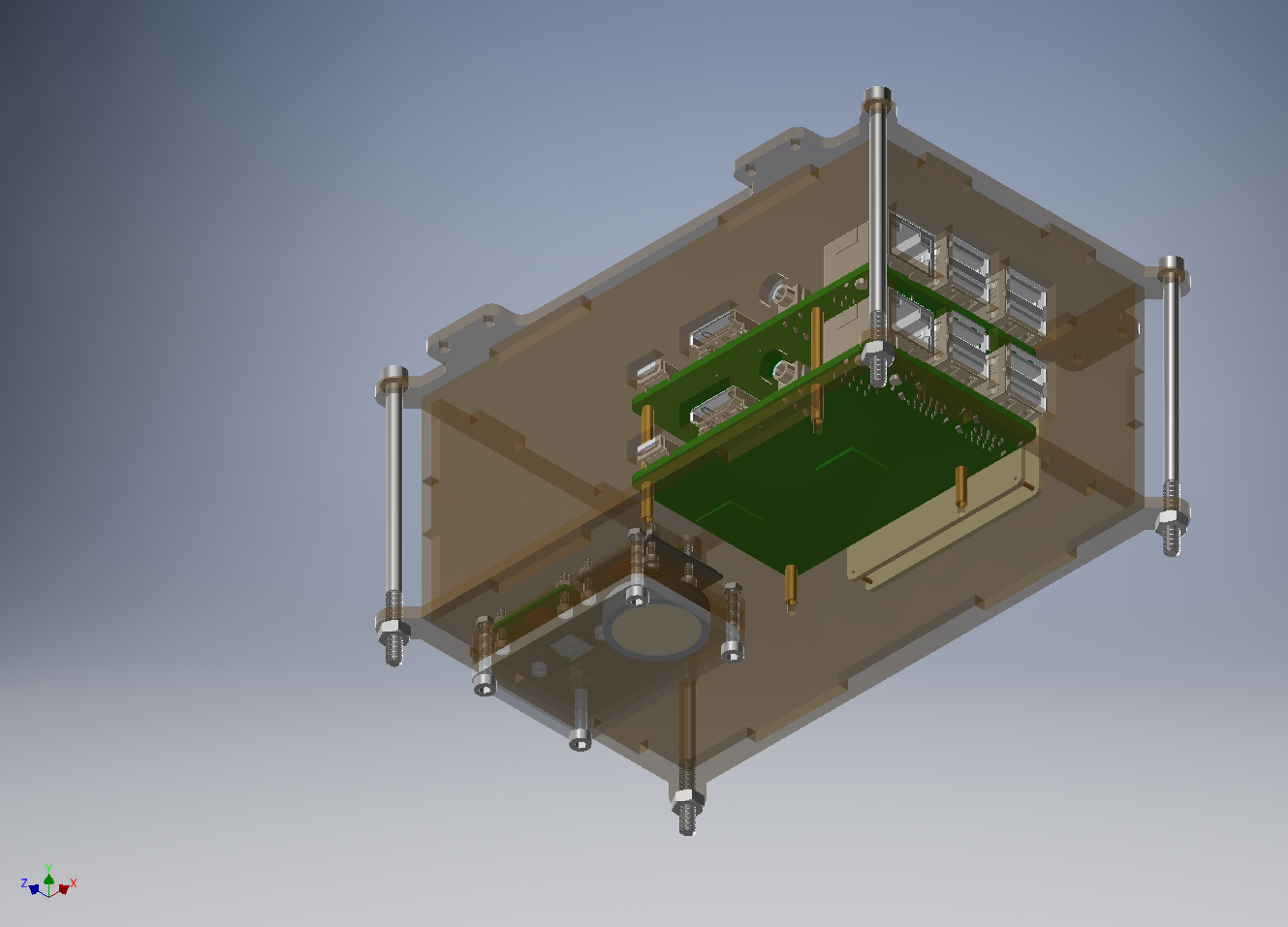
After using the camera for the first time, I realized that I needed to make some crucial changes to the box’s design. When I began creating the new box in Inventor, my main goal was to design it in a way that allowed for the full functionality of the Raspberry Pi’s to be accessed without having to disassemble the box. In addition, I wanted to be able to easily mount the camera to the drone. The first iteration required that the base plate be attached to the drone first, and then the rest of the box would be attached to the base plate. Not only was this process difficult, it was also time consuming and not practical for field use.
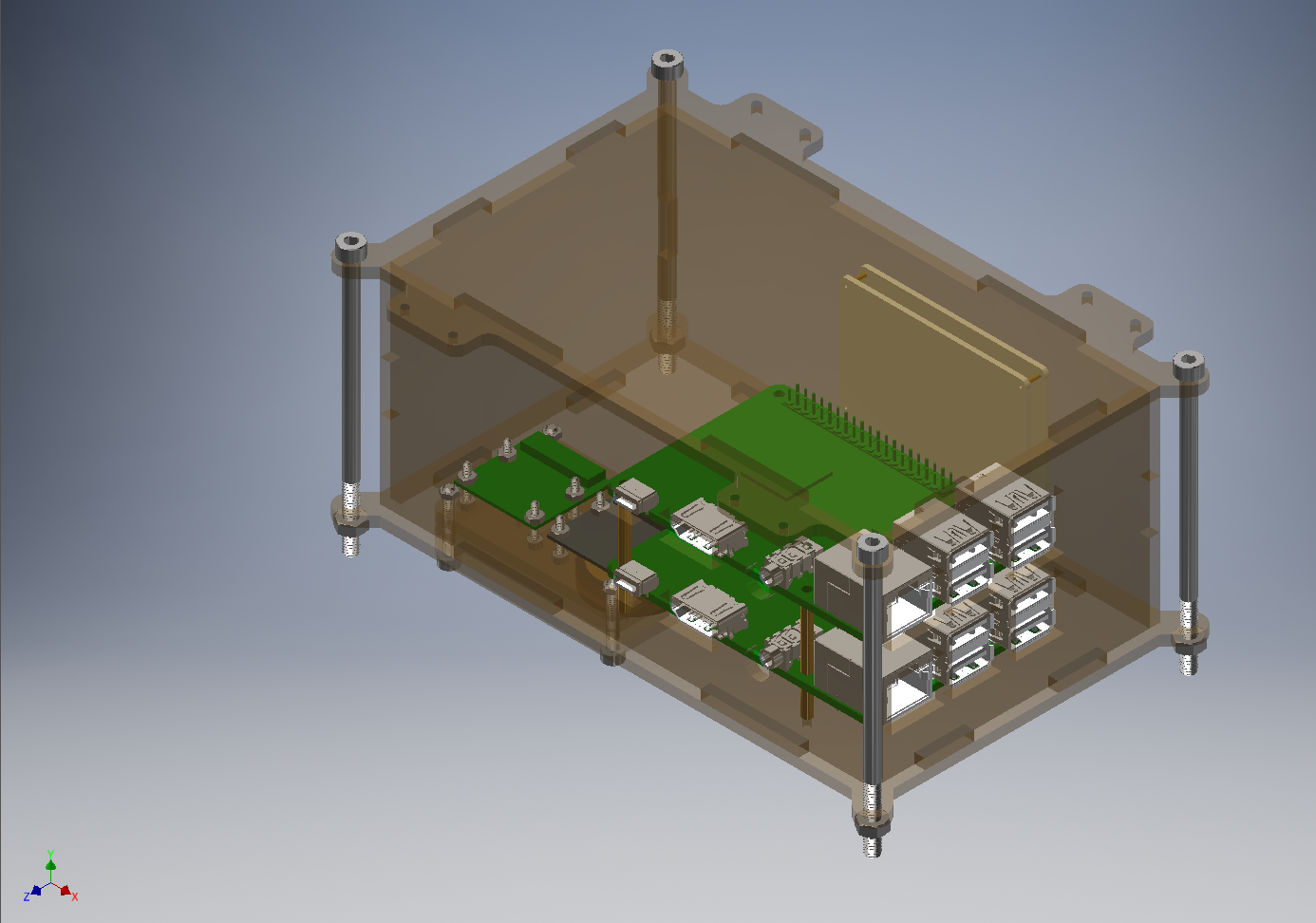
By viewing the picture above, one can notice a few key changes in the box’s design. I made cuts into the sides so that each receptacle on the Pi’s could be accessed. Also, I modeled the UBEC so that I could create enough room for it to be included inside the box. The Pi and Pi camera models were retrieved from GrabCad. On the top plate, there are four tabs that allow for easy mounting to the S900.
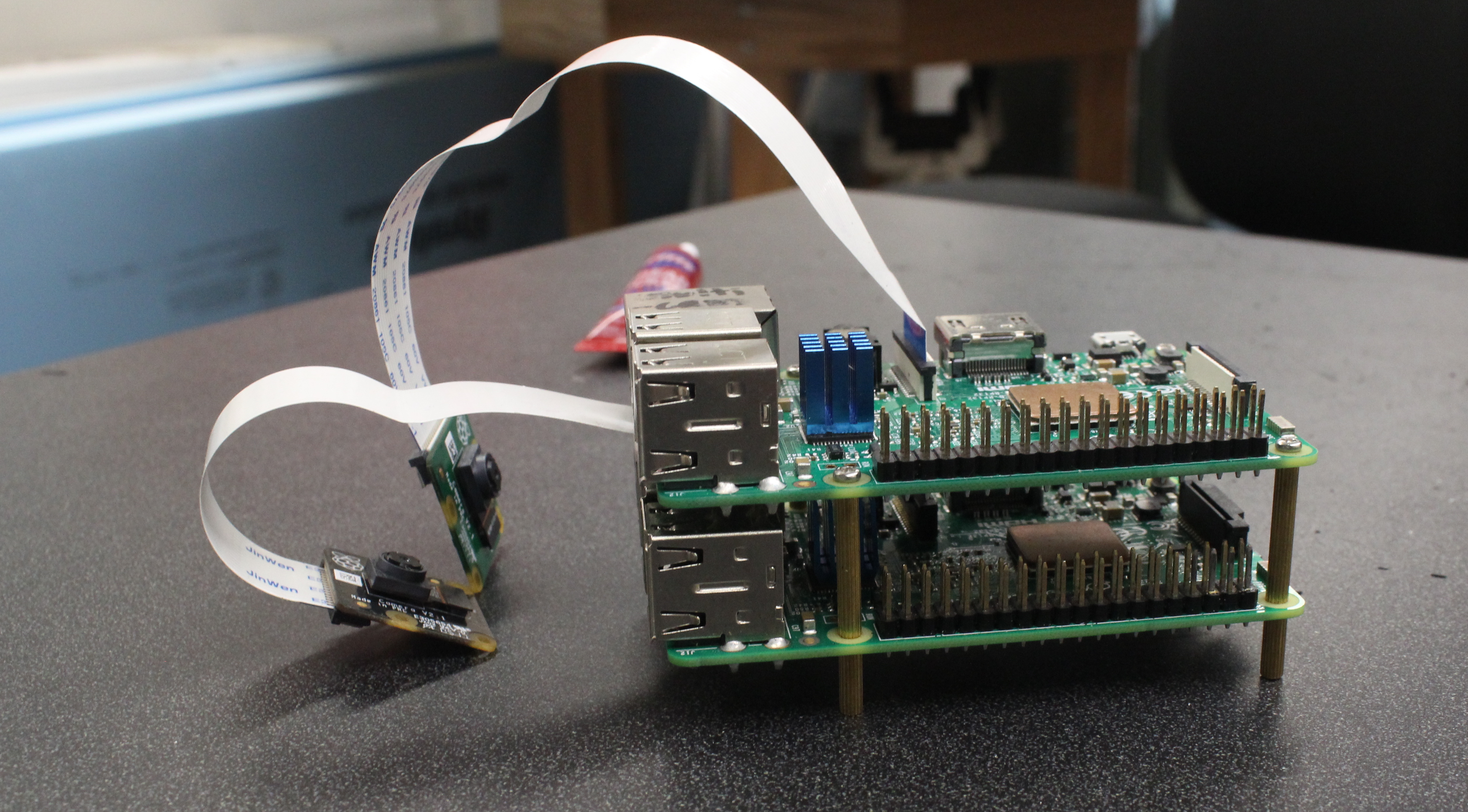
After my design passed its final design review, I made drawing files of the box pieces and cut them out of an acrylic sheet in a laser cutter. The fully assembled box can be seen below.

The camera itself was originally created using one Raspberry Pi and a camera multiplexer created by IVmech Mechatronix. Sadly, the multiplexer was defective, and IVmech was not very keen on providing assistance. To workaround this issue, it was decided that two Raspberry Pi’s were to be used. With Chris’s help, I created a code that takes an picture upon receiving a signal on a GPIO pin on the Raspberry Pi. These images are then saved to a separate directory in the Pi.
Once a multi-spectral image is taken, vegetative indices are used to evaluate crop health. The most popular of these indices is the Normalized Difference Vegetation Index, which shows the amount of photosynthetic activity occurring within plants. This metric is calculated by using the red and near infra-red bands of an image. The formula is as follows: NDVI = (NIR – red)/(NIR + red). Even though this is most popular vegetative index, it is definitely not the only one. To calculate NDVI and many other popular indices, I created a Matlab program that uses the camera’s images to create a color mapped, indexed image.
Currently, the camera and its respective programs are in their first iteration. Next, I plan to create a camera box that is more suitable for my current two-Pi design. Also, I plan to fine tune my vegetative index code so that it lines up two images automatically. In the future, I would like to create my camera program as an embedded software to lower boot times in the field. I will most likely do this with Raspberry Pi Zero’s so that I can make the camera box even smaller.
FILES: